PIC单片机C语言编程完全指南:从点亮LED到项目实战(附详细实例代码)
本文是PIC单片机C语言编程的终极指南,专为初学者和进阶者打造,我们将从零开始,手把手教你如何搭建开发环境,并通过三个递进式的经典实例——点亮LED、按键检测、串口通信——彻底掌握PIC单片机C语言编程的核心技巧,文末附有完整项目代码和常见问题解答,助你快速上手,将理论转化为实践。
引言:为什么选择PIC单片机与C语言?
在嵌入式系统的世界里,单片机是当之无愧的“大脑”,而PIC(Peripheral Interface Controller)单片机,以其高性价比、低功耗、丰富的外设和强大的抗干扰能力,在工业控制、消费电子、汽车电子等领域占据着重要地位。
相较于汇编语言,C语言具有可读性强、可移植性高、开发效率快等显著优势,它能让你更专注于功能逻辑的实现,而非繁琐的寄存器操作,掌握PIC单片机的C语言编程,是每一位嵌入式工程师的必备技能。
本文将以Microchip的PIC16F877A(一款经典且资料丰富的型号)为例,带你开启PIC单片机C语言编程之旅。
开发环境搭建:工欲善其事,必先利其器
在开始编程之前,我们需要准备好两样核心工具:编译器和仿真/烧录软件。
-
编译器:MPLAB XC8
- Microchip官方推出的免费版C编译器,功能强大,社区支持广泛,它是学习PIC C语言的首选。
- 下载与安装: 访问Microchip官网搜索“MPLAB XC8”,下载并按照提示完成安装。
-
集成开发环境:MPLAB X IDE
- 这是一个集代码编辑、编译、仿真、烧录于一体的强大平台,我们将在其中编写和管理我们的项目。
- 下载与安装: 同样在Microchip官网搜索“MPLAB X IDE”,建议与XC8一同安装。
-
硬件工具:PICkit 3/4 或 ICD 3/4
这款调试/编程器用于将编译好的程序下载到单片机中,并支持在线调试,是开发过程中不可或缺的利器。
 (图片来源网络,侵删)
(图片来源网络,侵删)
环境配置小结: 安装好MPLAB X IDE和XC8编译器,并将你的编程器连接到电脑,我们就万事俱备了!
核心概念:PIC单片机C编程基础
在进入实例之前,我们需要了解几个在PIC单片机C编程中至关重要的概念:
- 特殊功能寄存器: 这是PIC C编程的灵魂,单片机所有的外设(如GPIO、定时器、串口等)都是通过读写特定的寄存器来控制的。
TRISB寄存器用于设置B端口的引脚是输入还是输出,PORTB寄存器用于读取或写入B端口的电平。 - 配置位: 这些寄存器用于配置单片机的基本工作模式,如使用内部/外部时钟、看门狗是否开启等,正确配置配置位是程序稳定运行的前提。
#include头文件: 我们通常会包含<xc.h>,这个头文件定义了所用单片机型号的所有寄存器名称和位定义,让我们可以用标准化的方式访问它们。
PIC单片机C语言编程实例:从入门到精通
下面,我们通过三个实例,由浅入深,让你在实践中掌握核心技能。
Hello World——点亮一个LED
目标: 将连接在RB0引脚上的LED灯点亮。
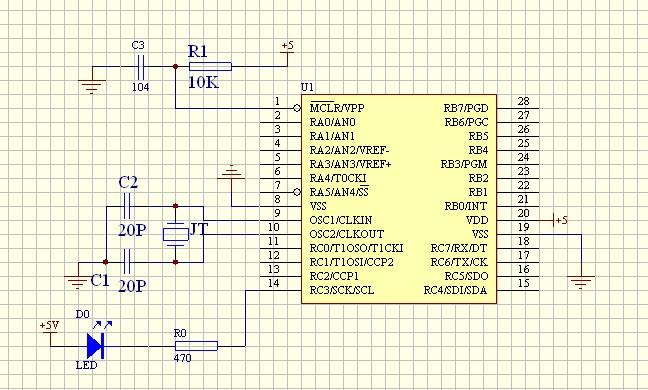
硬件连接:
- PIC16F877A的RB0引脚 -> 一个220Ω电阻 -> LED正极
- LED负极 -> GND (地)
C语言代码 (led.c):
// 包含Microchip XC8编译器提供的头文件
#include <xc.h>
// 配置位设置 (针对PIC16F877A)
// 使用内部8MHz振荡器,关闭看门狗
#pragma config FOSC = HS // High-speed oscillator
#pragma config WDTE = OFF // Watchdog Timer disabled
#pragma config PWRTE = OFF // Power-up Timer disabled
#pragma config CP = OFF // Code protection off
// 定义延时函数的简单实现
void simple_delay(unsigned int count) {
while(count--);
}
void main(void) {
// 1. 设置TRISB寄存器
// TRISB<0> = 0 将RB0设置为输出模式
// TRISB<7:1>保持不变,不影响其他引脚
TRISBbits.TRISB0 = 0;
// 2. 主循环
while(1) {
// 将RB0引脚输出高电平 (点亮LED)
PORTBbits.RB0 = 1;
// 调用延时函数,让灯亮一会儿
simple_delay(50000);
// 将RB0引脚输出低电平 (熄灭LED)
PORTBbits.RB0 = 0;
// 调用延时函数,让灯灭一会儿
simple_delay(50000);
}
}
代码解析:
#include <xc.h>:包含了所有寄存器定义。#pragma config ...:配置单片机的基本工作参数。TRISBbits.TRISB0 = 0;:这是关键!TRIS寄存器控制引脚方向,1为输入,0为输出,我们将RB0设为输出。PORTBbits.RB0 = 1;:向PORT寄存器的RB0位写入1,该引脚输出高电平,LED点亮。while(1):一个无限循环,让LED持续闪烁。
操作步骤:
- 在MPLAB X IDE中新建一个“C18 Project for PIC18 MCU”项目(虽然我们用PIC16,但流程通用,选择对应的PIC16F877A设备即可)。
- 将上述代码保存为
led.c并添加到项目中。 - 选择你的编程器(如PICkit 3)。
- 点击“Build Project”编译代码。
- 点击“Make and Program Device”将程序下载到单片机中。
- 观察开发板上LED的闪烁效果!
交互核心——按键检测与LED控制
目标: 检测一个按键是否被按下,如果按下,则改变LED的状态(亮变灭,灭变亮)。
硬件连接:
- LED部分: 同实例一。
- 按键部分:
- 一个按键的一端连接到RA2引脚。
- 按键的另一端连接到GND。
- 在RA2引脚和VCC (5V) 之间接一个10KΩ的上拉电阻。
C语言代码 (button_led.c):
#include <xc.h>
#pragma config FOSC = HS
#pragma config WDTE = OFF
#define LED_PIN PORTBbits.RB0
#define BUTTON_PIN PORTAbits.RA2
void main(void) {
// 设置RB0为输出
TRISBbits.TRISB0 = 0;
// 设置RA2为输入
TRISAbits.TRISA2 = 1;
// 初始化LED为熄灭状态
LED_PIN = 0;
while(1) {
// 检测按键是否按下 (按下时RA2被拉到低电平,为0)
if (BUTTON_PIN == 0) {
// 消抖:延时一小段时间,再次检测,确认是真实按下
simple_delay(1000);
if (BUTTON_PIN == 0) {
// 改变LED状态
LED_PIN = ~LED_PIN; // 使用取反操作,非常方便
// 等待按键释放,避免一次按下被多次检测
while(BUTTON_PIN == 0);
}
}
}
}
// (simple_delay函数同实例一)
void simple_delay(unsigned int count) {
while(count--);
}
代码解析:
TRISAbits.TRISA2 = 1;:将RA2设置为输入模式。#define:使用宏定义,让代码更易读。if (BUTTON_PIN == 0):判断按键是否按下,由于有上拉电阻,正常情况下RA2为高电平(1),按键按下后,RA2被拉到GND,变为低电平(0)。simple_delay(1000);和if (BUTTON_PIN == 0):这是经典的软件消抖方法,可以避免按键在机械接触瞬间产生的抖动信号被误判为多次按下。LED_PIN = ~LED_PIN;:是C语言的按位取反操作,如果LED_PIN原来是0(灭),取反后变为1(亮);原来是1(亮),取反后变为0(灭),这是一种非常优雅的翻转状态的方法。
通信桥梁——USART串口发送数据
目标: 配置PIC单片机的USART(串口)外设,每隔一秒钟向电脑发送一条“Hello from PIC!”的字符串。
硬件连接:
- PIC16F877A的RC6 (TX)引脚 -> USB转TTL模块的RXD引脚。
- PIC16F877A的RC7 (RX)引脚 -> USB转TTL模块的TXD引脚。
- USB转TTL模块的VCC接5V,GND接GND。
C语言代码 (uart.c):
你需要一个支持串口输入输出的C库函数,例如printf,在XC8中,你需要启用stdio库。
#include <xc.h>
#include <stdio.h> // 包含标准输入输出库,以使用printf
#pragma config FOSC = HS
#pragma config WDTE = OFF
#pragma config LVP = OFF // 必须关闭低电压编程,以释放RC6/RC7引脚
// 定义波特率和系统时钟频率
#define _XTAL_FREQ 8000000 // 8MHz
#define BAUD_RATE 9600
// 初始化USART
void UART_Initialize() {
// 设置串口模式为异步,8位数据位,1个停止位,无校验位
TXSTAbits.TX9 = 0; // 8位数据
TXSTAbits.TXEN = 1; // 使能发送
TXSTAbits.SYNC = 0; // 异步模式
RCSTAbits.SPEN = 1; // 使能串口
// 计算并设置波特率 (对于异步模式)
// SPBRG = (Fosc / (64 * BaudRate)) - 1
SPBRG = (_XTAL_FREQ / (64UL * BAUD_RATE)) - 1;
}
// 发送一个字符
void UART_SendChar(char data) {
while(!PIR1bits.TXIF); // 等待发送缓冲区为空
TXREG = data; // 将数据写入发送寄存器
}
// 发送一个字符串
void UART_SendString(const char *str) {
while(*str != '\0') {
UART_SendChar(*str);
str++;
}
}
void main(void) {
// 设置RC6(TX)和RC7(RX)为功能引脚
// 对于USART,TRISC<6:7>应自动由硬件控制,但最好明确设置
TRISCbits.TRISC6 = 1; // 输出,但设置为1让USART控制
TRISCbits.TRISC7 = 1; // 输入
UART_Initialize();
while(1) {
UART_SendString("Hello from PIC!\r\n"); // 发送字符串,并回车换行
__delay_ms(1000); // 使用XC8内置的精确延时函数
}
}
代码解析:
#include <stdio.h>:引入printf等标准函数。#pragma config LVP = OFF:极其重要! 如果开启低电压编程,RC6引脚会被占用,无法用作普通I/O或串口发送。UART_Initialize():这是初始化函数的核心,它配置了TXSTA和RCSTA寄存器来设置串口模式,并通过SPBRG寄存器计算并设置波特率,波特率公式必须严格遵守。UART_SendChar():通过轮询PIR1寄存器的TXIF位(发送中断标志位)来判断发送缓冲区是否为空,为空则写入新数据。UART_SendString():循环调用UART_SendChar(),直到字符串结束符\0。__delay_ms(1000):这是XC8编译器提供的内置函数,比我们自己写的simple_delay更精确,可以直接指定毫秒数。- 电脑端操作: 下载程序后,打开串口调试助手(如“SSCOM”、“XCOM”等),选择正确的COM口,设置波特率为9600,8N1,你将能看到每秒刷新一次的“Hello from PIC!”。
总结与进阶
通过以上三个实例,你已经掌握了PIC单片机C语言编程的核心:寄存器操作、外设配置(GPIO、USART)、以及基本的程序流程控制(循环、判断)。
下一步,你可以探索的方向包括:
- 定时器/计数器: 用于精确定时、事件计数、产生PWM波等。
- ADC(模数转换器): 读取传感器(如温度、光敏)的模拟信号。
- I2C/SPI通信协议: 与各种传感器、存储芯片(如EEPROM、OLED屏)进行通信。
- 中断系统: 让单片机能够响应外部事件(如按键按下),提高程序效率。
完整项目代码下载
为了方便大家学习和实践,我们已经将以上三个实例的完整MPLAB X项目文件打包,关注我们的[公众号/网站名称],回复关键词 “PIC实例代码” 即可免费获取!
常见问题解答
Q1: 为什么我的LED不亮/闪烁不正常? A1: 请检查以下几点:
- 硬件连接: 是否接反了LED(正负极)?电阻是否合适?接线是否牢固?
- 配置位:
FOSC配置是否与你的硬件晶振匹配?LVP是否关闭? - 引脚定义:
TRIS寄存器设置是否正确(输出为0)?PORT寄存器操作的是否是正确的引脚? - 编译与下载: 代码是否成功编译并下载到了单片机中?
Q2: 按键检测时,为什么有时会一次触发多次? A2: 这是典型的按键抖动问题,虽然我们在代码中加入软件消抖,但如果延时时间不够或按键质量较差,仍可能发生,可以尝试增加消抖延时的时间,或使用硬件RC滤波电路来配合。
Q3: 串口助手收不到任何数据? A3: 请检查:
- 硬件连接: TX和RX是否交叉连接(PIC的TX接模块的RX)?USB转TTL模块是否被正确识别?
- 波特率: 串口助手的波特率设置是否与程序中
BAUD_RATE的定义完全一致? - 配置位:
LVP是否设置为OFF? - 初始化:
UART_Initialize()函数是否被正确调用?
PIC单片机C语言编程的世界广阔而精彩,希望这篇详尽的指南能为你铺平道路,点燃你对嵌入式开发的热情,编程的精髓在于实践,大胆动手,不断尝试,你一定能成为一名优秀的嵌入式工程师!


