第一部分:嵌入式软件开发基础
什么是嵌入式系统?
嵌入式系统是一个嵌入在其他设备中的专用计算机系统,它的特点是:
- 专用性:为完成特定任务而设计,不像PC那样通用。
- 资源受限:通常拥有有限的CPU处理能力、内存(RAM/ROM)和存储空间。
- 与硬件紧密耦合:软件直接控制硬件,需要精确管理寄存器、外设等。
- 高可靠性:许多系统(如汽车、医疗设备)要求7x24小时稳定运行。
- 实时性:必须在严格规定的时间内对外部事件做出响应(实时系统)。
例子:智能手机、汽车电子(ECU)、智能家居设备、无人机、工业控制器、智能手表等。
嵌入式软件开发流程
一个典型的嵌入式软件开发流程类似于传统软件开发,但更侧重于硬件交互和系统级优化。
- 需求分析:明确系统功能、性能指标、功耗要求、成本限制等。
- 系统设计:
- 硬件选型:选择合适的微控制器/微处理器。
- 架构设计:确定软件模块划分、任务调度(RTOS)、通信协议等。
- 编码实现:使用C/C++等语言编写代码。
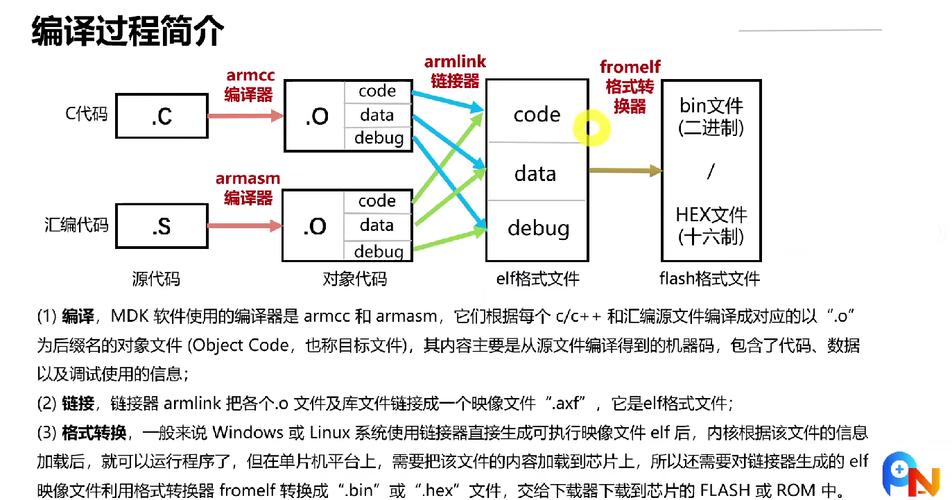
- 交叉编译:在宿主机(如PC,Linux/Windows)上使用交叉编译器(如
arm-none-eabi-gcc)将代码编译成目标硬件(如ARM Cortex-M)可执行的机器码。 - 烧录/下载:将编译生成的二进制文件(如
.hex,.bin)通过烧录器(如J-Link, ST-Link)下载到目标硬件的Flash中。 - 调试:
- 硬件调试:使用在线调试器,在目标硬件上设置断点、单步执行、查看内存和寄存器。
- 软件调试:通过串口打印日志(
printf重定向)来观察程序运行状态。
- 测试:进行单元测试、集成测试和系统测试,验证功能是否符合需求。
- 部署与维护:将产品发布到市场,并根据需要进行软件更新和维护。
第二部分:C语言在嵌入式开发中的核心地位
C语言是嵌入式开发的“官方语言”,原因如下:
- 高效性:C语言能直接操作内存和硬件,生成的代码执行效率高,接近汇编语言。
- 可移植性:C语言的标准(ANSI C)保证了在不同平台上的核心语法一致,当硬件平台更换时,只需修改与硬件相关的部分(如驱动),核心业务逻辑代码可以复用。
- 对硬件的直接访问能力:通过指针、位操作、结构体等,C语言可以方便地操作寄存器、内存映射外设等。
- 丰富的工具链支持:几乎所有主流的MCU都有成熟且免费的C语言编译器、调试器和开发环境。
第三部分:C语言实现的关键技术与技巧
在嵌入式C编程中,有一些技术和概念是必须掌握的。
指针与内存操作
这是C语言的灵魂,也是嵌入式开发的核心。
-
寄存器操作:硬件外设的控制寄存器通常被映射到特定的内存地址。
// 假设GPIOA的输出数据寄存器地址为 0x40020014 #define GPIOA_ODR (*(volatile unsigned int *) 0x40020014) // 设置PA5引脚为高电平 GPIOA_ODR |= (1 << 5);
-
volatile关键字:告诉编译器这个变量可能会被硬件(中断、DMA等)改变,不要对其进行优化(如认为它不会变而省略访问)。volatile unsigned int *p_timer_counter = (volatile unsigned int *)0x40012400;
-
内存布局:理解代码区、数据区、BSS区、堆和栈的分布,对于内存管理和调试至关重要。
 (图片来源网络,侵删)
(图片来源网络,侵删)
位操作
嵌入式开发中经常需要配置单个或多个位,位操作非常高效。
&(与), (或),^(异或), (取反),<<(左移),>>(右移)- 置1:
port |= (1 << 5); - 清0:
port &= ~(1 << 5); - 取反:
port ^= (1 << 5); - 检查某位:
if (port & (1 << 5)) { ... }
中断服务程序
中断是嵌入式系统响应外部事件的关键机制。
-
特点:执行速度要快,尽量不做耗时操作(如复杂计算、函数调用)。
-
结构:通常由编译器提供的宏或关键字来声明。
// 以STM32 HAL库为例 void EXTI15_10_IRQHandler(void) { // 检查是否是引脚5的中断 if (__HAL_GPIO_EXTI_GET_IT(GPIO_PIN_5) != RESET) { // 清除中断标志位,非常重要! __HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_5); // 执行中断处理逻辑 // ... } }
驱动程序开发
驱动是软件与硬件之间的桥梁,通常以“寄存器操作”为基础,封装成易于使用的函数。
-
以GPIO(通用输入输出)驱动为例:
// gpio.h void GPIO_Init(void); void GPIO_SetPin(int pin, int state); // state: 0 or 1 // gpio.c #include "stm32f4xx.h" // 假设使用STM32F4系列MCU的头文件 void GPIO_Init(void) { // 1. 使能GPIOA时钟 RCC->AHB1ENR |= RCC_AHB1ENR_GPIOAEN; // 2. 配置PA5为推挽输出模式 GPIOA->MODER &= ~(3U << (5 * 2)); // 清除原有配置 GPIOA->MODER |= (1U << (5 * 2)); // 设置为输出模式 (01) GPIOA->OTYPER &= ~(1U << 5); // 推挽输出 GPIOA->OSPEEDR |= (3U << (5 * 2)); // 高速 } void GPIO_SetPin(int pin, int state) { if (state) { GPIOA->BSRR = (1U << pin); // 置1 } else { GPIOA->BSRR = (1U << (pin + 16)); // 清0 (BSRR的高16位用于复位) } }
实时操作系统
对于复杂的嵌入式系统,使用RTOS可以更好地管理任务、资源和时间。
-
任务/线程:一个独立的、拥有自己栈空间的执行流。
-
调度器:RTOS的核心,决定哪个任务在何时获得CPU使用权(如基于优先级的抢占式调度)。
-
同步与通信:
- 信号量:用于资源计数或任务同步。
- 互斥锁:用于保护共享资源,防止并发访问冲突。
- 消息队列:用于任务间的异步通信。
-
使用FreeRTOS(最流行的开源RTOS)的简单例子:
#include "FreeRTOS.h" #include "task.h" void vTask1(void *pvParameters) { while (1) { // 任务1的逻辑 vTaskDelay(pdMS_TO_TICKS(100)); // 延时100ms,让出CPU } } void vTask2(void *pvParameters) { while (1) { // 任务2的逻辑 vTaskDelay(pdMS_TO_TICKS(200)); // 延时200ms } } int main(void) { // ... 硬件初始化 ... xTaskCreate(vTask1, "Task1", 128, NULL, 1, NULL); xTaskCreate(vTask2, "Task2", 128, NULL, 1, NULL); vTaskStartScheduler(); // 启动调度器 for(;;); // 正常情况下不会执行到这里 }
第四部分:一个简单的实例:LED闪烁
让我们通过一个最经典的“LED闪烁”项目,来串联上述知识点。
目标:让STM32F4开发板上的一个LED灯以1秒的间隔闪烁。
步骤:
-
硬件:STM32F4 Discovery板,LED连接在PC13引脚。
-
工具链:STM32CubeIDE (集成了GCC编译器和调试器)。
-
C语言实现:
-
main.c#include "stm32f4xx.h" // 包含STM32F4系列的头文件,定义了所有寄存器地址 // 简单的延时函数(不精确,仅用于演示) void simple_delay(volatile uint32_t count) { while(count--); } int main(void) { // 1. 使能GPIOC的时钟 // RCC是复位和时钟控制寄存器组 // AHB1ENR是AHB1总线的使能寄存器 // GPIOCEN是GPIOC的使能位 (bit 2) RCC->AHB1ENR |= RCC_AHB1ENR_GPIOCEN; // 2. 配置PC13引脚为输出模式 // MODER是模式寄存器,每2位控制一个引脚 // 00=输入, 01=输出, 10=复用功能, 11=模拟模式 // 我们需要清除PC13的原有配置 (11),然后设置为输出 (01) GPIOC->MODER &= ~(3U << (13 * 2)); // 清除PC13的MODER位 (bit 26-27) GPIOC->MODER |= (1U << (13 * 2)); // 设置PC13为输出模式 // 3. 主循环 while (1) { // 点亮LED (STM32板载LED是低电平点亮) // BSRR是置位/复位寄存器 // 低16位用于置1,高16位用于清0 // 向BSRR的低16位写入1<<13,会将PC13置1,LED熄灭 GPIOC->BSRR = (1U << 13); simple_delay(500000); // 延时 // 熄灭LED // 向BSRR的高16位写入1<<13,会将PC13清0,LED点亮 GPIOC->BSRR = (1U << (13 + 16)); simple_delay(500000); // 延时 } }
-
代码解读:
RCC->AHB1ENR |= ...:这是所有STM32外设操作的第一步——使能时钟,没有时钟,外设无法工作。GPIOC->MODER &= .../GPIOC->MODER |= ...:通过位操作精确配置GPIO引脚的工作模式。GPIOC->BSRR = ...:使用BSRR寄存器来控制引脚电平,这是一个“原子操作”(一次写入),非常安全高效,可以避免在置位和复位之间被其他代码打断。while(1):嵌入式程序的主循环,永不退出。
第五部分:挑战与未来趋势
挑战
- 复杂性:随着系统功能增多,软件复杂性指数级增长,调试和维护难度大。
- 实时性与可靠性:硬实时系统要求必须在微秒甚至纳秒级响应,对软件设计和硬件理解要求极高。
- 安全与安全:汽车、工业等领域对功能安全和网络安全的要求越来越高。
- 功耗管理:电池供电设备需要精细的功耗控制。
未来趋势
- 物联网:嵌入式设备成为物联网的终端节点,需要连接网络、处理数据。
- 人工智能/机器学习:在边缘设备上运行轻量级AI模型(如TinyML),实现智能决策。
- 更高的集成度:SoC(片上系统)成为主流,将CPU、GPU、AI加速器、多种外设集成在一块芯片上。
- 安全启动和安全固件:硬件级的安全模块(如TrustZone)和安全固件更新协议越来越普及。
- 模型驱动开发:使用MATLAB/Simulink等工具进行系统建模和代码自动生成,提高开发效率和可靠性。
嵌入式软件开发是一门融合了硬件知识、软件技能和系统思维的综合性学科,C语言作为其核心工具,提供了与硬件直接对话的能力,掌握指针、位操作、中断、驱动开发和RTOS等概念是成为一名合格嵌入式工程师的基石,从简单的LED闪烁开始,逐步深入到复杂的系统设计,不断实践和总结,是通往嵌入式开发专家之路的唯一途径。


